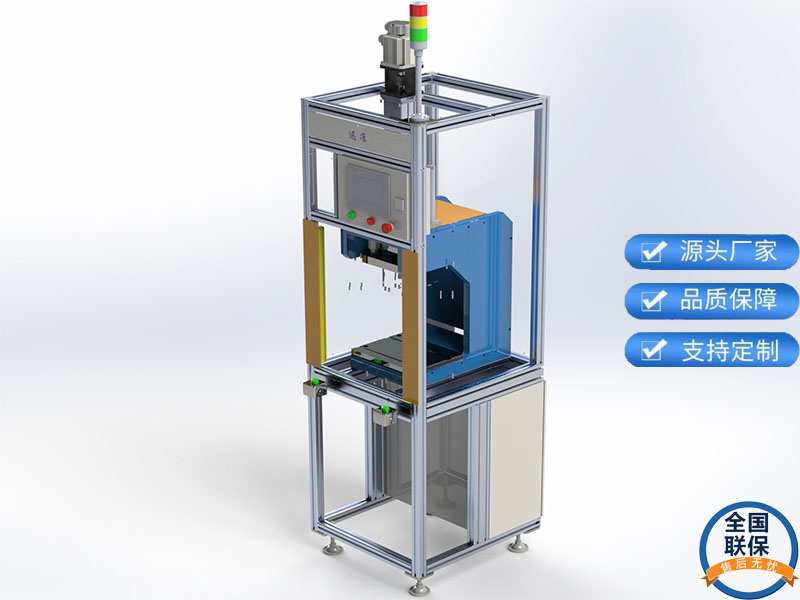
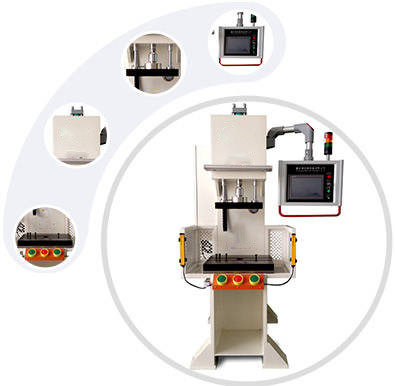
精密伺服壓裝解決方案和核心技術(shù)
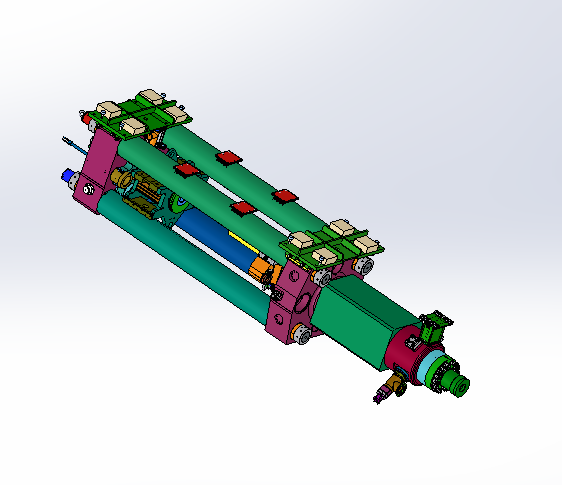
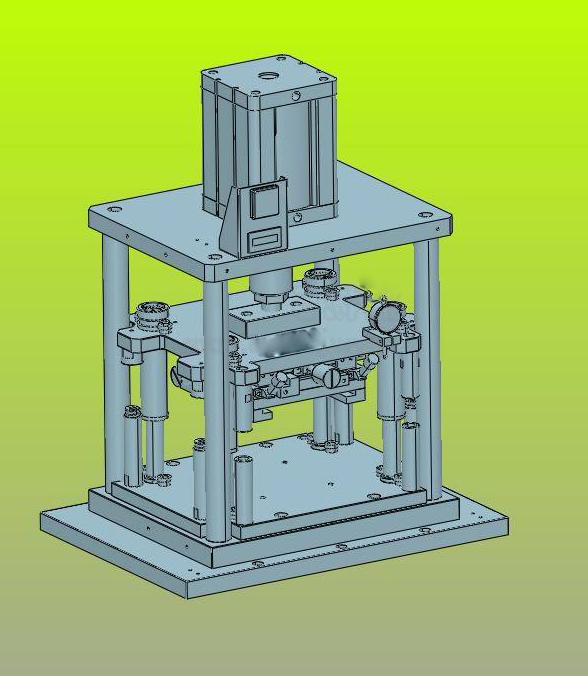
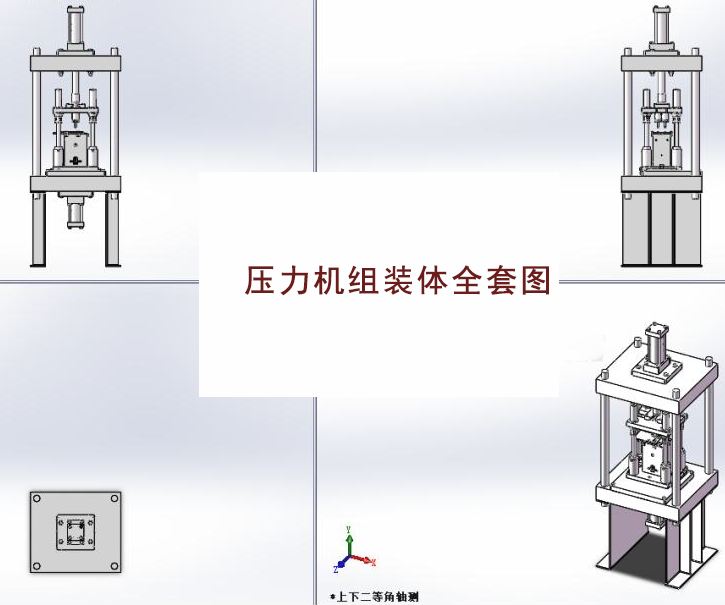
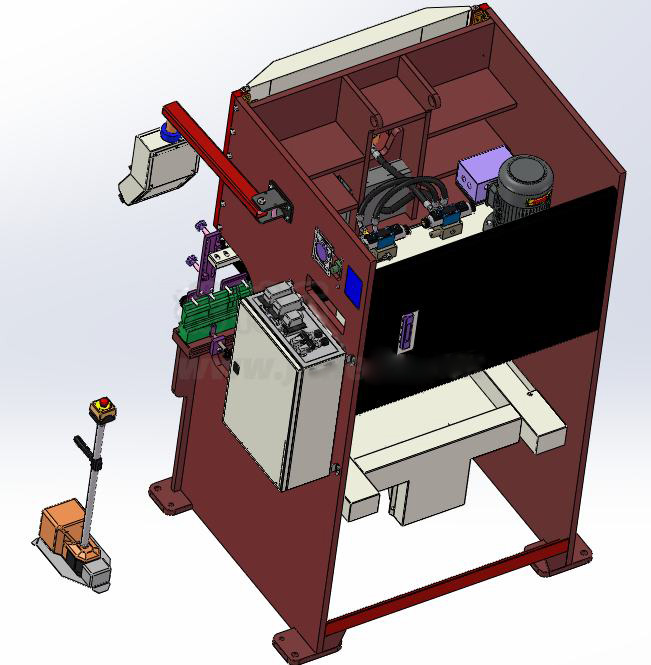
精密伺服壓裝解決方案和核心技術(shù) 精密伺服壓裝智能壓裝解決方案是一種結(jié)合高精度伺服控制技術(shù)、智能化算法和工業(yè)物聯(lián)網(wǎng)(IIoT)的先進制造技術(shù),,廣泛應(yīng)用于汽車,、電子、航空航天,、醫(yī)療器械等領(lǐng)域的精密裝配,。以下是其主要解決方案和核心技術(shù): 1.精密伺服壓裝系統(tǒng)核心組成 伺服壓機(Servo Press) 采用高精度伺服電機驅(qū)動,實現(xiàn)壓力,、速度,、位移的閉環(huán)控制,支持多種壓裝模式(恒力壓裝,、多段壓裝,、軟著陸等)?! ×?位移實時監(jiān)控 通過高精度力傳感器和位移編碼器,,實時采集壓裝過程中的力-位移曲線,確保壓裝質(zhì)量,?! ≈悄軌貉b控制器 內(nèi)置PLC或?qū)S每刂破鳎С志幊淘O(shè)定壓裝參數(shù)(如壓力閾值、公差范圍,、過載保護),。 2.智能壓裝解決方案功能 過程質(zhì)量控制 力-位移曲線分析:實時對比預設(shè)曲線,,自動判斷壓裝是否合格(如過壓,、欠壓、反彈檢測),?! PC統(tǒng)計過程控制:數(shù)據(jù)存檔并生成統(tǒng)計報告,用于工藝優(yōu)化和質(zhì)量追溯,?! ∽赃m應(yīng)壓裝 根據(jù)材料變形、溫度變化或部件公差自動調(diào)整壓裝參數(shù),,補償工藝波動,。 防錯與預警 異物檢測,、部件缺失檢測,、壓裝角度偏移報警等?! 《喙の粎f(xié)同 與機器人,、傳送帶、視覺系統(tǒng)集成,,實現(xiàn)全自動化產(chǎn)線(如汽車發(fā)動機裝配線),。 3.智能化技術(shù)擴展 AI與機器學習 通過歷史數(shù)據(jù)訓練模型,,預測壓裝質(zhì)量并優(yōu)化參數(shù)(如壓力衰減補償),。 機器視覺集成 視覺定位引導(確保部件正確放置),、壓裝后外觀檢測(如密封圈變形檢查)?! ?shù)字孿生與仿真 虛擬調(diào)試壓裝工藝,,模擬不同工況下的壓裝效果,縮短開發(fā)周期,?! ?.行業(yè)應(yīng)用案例 汽車制造 發(fā)動機部件(軸承、軸套壓裝),、電池模組組裝,、剎車片壓接。 3C電子 手機/電腦內(nèi)部精密連接器壓裝,、屏幕貼合,、PCB板元件壓接?! ♂t(yī)療器械 注射器針頭組裝,、高精度傳感器壓裝(需潔凈環(huán)境適配)?! ⌒履茉础 恿﹄姵仉娦径询B,、燃料電池雙極板壓裝?! ?.系統(tǒng)集成與工業(yè)互聯(lián) 與MES/ERP對接 實時上傳生產(chǎn)數(shù)據(jù)(良率,、設(shè)備狀態(tài))至工廠管理系統(tǒng)?! ∵h程監(jiān)控與維護 通過IIoT平臺實現(xiàn)設(shè)備遠程診斷,、OTA軟件升級、預防性維護提醒,?! ∵吘売嬎恪 ≡诒镜卦O(shè)備端實時處理數(shù)據(jù),降低云端依賴,,提升響應(yīng)速度,。 6.優(yōu)勢與價值 高精度:重復定位精度可達±0.01mm,,壓力控制精度±1%FS,。 節(jié)能環(huán)保:相比傳統(tǒng)液壓系統(tǒng)節(jié)能30%-60%,,減少油污污染,。 柔性生產(chǎn):快速切換程序,,適應(yīng)多品種小批量生產(chǎn),。 零缺陷制造:通過實時質(zhì)檢降低廢品率,,符合工業(yè)4.0標準,。 7.典型供應(yīng)商與方案 國際品牌: 舒勒(Schuler),、博世力士樂(Bosch Rexroth),、法格塞達(Fagor Arrasate)?! 鴥?nèi)領(lǐng)先: 埃斯頓(ESTUN),、匯川技術(shù)(Inovance),、新松(SIASUN)?! 《ㄖ苹?wù): 根據(jù)客戶需求提供模塊化設(shè)計(如防爆型,、潔凈室型伺服壓機)?! ⊥ㄟ^上述方案,,企業(yè)可實現(xiàn)從傳統(tǒng)壓裝向智能化、數(shù)字化的轉(zhuǎn)型,,顯著提升生產(chǎn)效率和產(chǎn)品一致性,。如果需要更具體的場景適配方案,可進一步提供應(yīng)用細節(jié),。
[查看詳情]